Rychlé šípy - sešit 7
- 72 pages
- 3 hours of reading


„Verschwundener Böhmerwald 3“ entführt in die einzigartige Landschaft des Böhmerwaldes und beleuchtet dessen turbulente Geschichte. Der Geschichtenerzähler Emil Kintzl und Regisseur Jan Fischer erkunden das Schicksal von Menschen und Orten, die der Zeit zum Opfer fielen. Historische Fotografien ergänzen die spannenden Erzählungen.
Šestý sešit Rychlých šípů! V moderním sešitovém vydání Rychlých šípů najdete původní díly slavného komiksu i nové příběhy ze světa Jaroslava Foglara od současných tvůrců. Tématem šestého čísla jsou knihy Pod junáckou vlajkou a Devadesátka pokračuje, na které odkáže komiks Marka Pokorného a únikovka Honzy Smolíka. Velkým komiksem bude Nebožtíkovo tele od autorů komiksové ságy Rváčov – Džiana Babana a Richarda Fischera, který nás přivede k nálezu mrtvých německých vojáků ve Stínadlech. A pokračují samozřejmě i Nikkarinovi Plantážnici.
Pátý sešit Rychlých šíípů! V moderním sešitovém vydání Rychlých šípů najdete původní díly slavného komiksu i nové příběhy ze světa Jaroslava Foglara od současných tvůrců. Tématem jsou tentokrát povídky – výtvarně je zpracovali Jiří Grus, Miroslav Schönberg a Michal Kocián.Nechybí ani Nikkarinovi Plantážníci nebo únikovka od Honzy Smolíka.
Čtvrtá sešitovka Rychlých šípů. Tentokrát s náloží zajímavostí o Chatě v Jezerní kotlině! V moderním sešitovém vydání Rychlých šípů najdete původní díly slavného komiksu i nové příběhy ze světa Jaroslava Foglara od současných tvůrců. V komiksu Poslední dobrodružství Černé vlajky, který podle scénáře Petra Hugo Šlika nakreslil Ticho 762, se vydáte do Sudet těsně po německém záboru. Nechybí ani Nikkarinovi Plantážníci, únikovka od Honzy Smolíka nebo cesta do Jezerní kotliny z pera Pavla Čecha. A právě legendární Chatě v Jezerní kotlině se věnuje téma čísla.
Sešitové vydání Rychlých šípů otevírá celý nový svět příběhů Jaroslava Foglara! Rychlé šípy vycházejí pro malé čtenáře i jejich rodiče v novém sešitovém vydání. V každém svazečku najdete původní komiksový seriál a zároveň zbrusu nové komiksy ze světa Jaroslava Foglara od současných tvůrců. Komiksy jsou doplněné tematickým povídáním, hrami, soutěžemi a kvízy. Vhodné pro každého plantážníka od 6 do 99 let! V prvním díle se seznámíte podrobně s Rychlými šípy. V novém seriálu kreslíře Nikkarina poznáte dnešní Plantážníky, kteří pátrají po minulosti slavného klubu. Do ponurého dětství vynálezce létajícího kola Jana Tleskače se přenesete v komiksu od Davida J. Žáka a Renaty Wilfling.
Rychlé šípy vycházejí pro malé čtenáře i jejich rodiče v novém sešitovém vydání. V každém svazečku najdete původní komiksový seriál a zároveň zbrusu nové komiksy ze světa Jaroslava Foglara od současných tvůrců. Komiksy jsou doplněné tematickým povídáním, hrami, soutěžemi a kvízy. Vhodné pro každého plantážníka od 6 do 99 let!V druhém svazku se více dozvíte o románu Hoši od Bobří řeky, který Foglara proslavil. V seriálu kreslíře Nikkarina budete sledovat další dobrodružství Plantážníků, kteří pátrají po minulosti klubu Rychlých šípů.
Pricing in SD erfolgreich meistern - geeignet für SAP ERP und SAP S/4HANA
In diesem Buch erfahren Sie, wie Sie die Preisfindung in Ihrem Unternehmen effektiv einrichten und optimieren, um sowohl grundlegende als auch komplexe Anforderungen zu erfüllen. Das Autorenteam führt Sie durch die Grundlagen der Konditionstechnik, das Standard-Customizing und die individuellen Anpassungen im SAP-System. Sie lernen den Umgang mit Konditionssätzen, Kalkulationsschemata und weiteren wichtigen Elementen. Detaillierte Informationen zu Formeln und Bedingungen helfen Ihnen, auch anspruchsvollste Wünsche der Vertriebskollegen umzusetzen. Der Inhalt umfasst die Einsatzgebiete und Elemente der Konditionstechnik, die Pflege von Konditionsstammdaten, Auswertungen, Customizing der Preisfindung und spezielle Funktionen. Zudem werden typische Praxisanforderungen und deren Lösungen behandelt. Sie erhalten Einblicke in die Preisfindung in verschiedenen Applikationen, die Bonusabwicklung im Vertrieb sowie die Performance-Optimierung und Testverfahren. Ein besonderer Fokus liegt auf den Unterschieden und Gemeinsamkeiten zwischen SAP ERP und SAP S/4HANA, einschließlich der Migration und Preisfindung in der Cloud. Das Buch bietet umfassende Anleitungen und praxisnahe Tipps, um die Preisfindung in Ihrem Unternehmen zu revolutionieren und die Effizienz zu steigern.
"Ich weiß nicht, ob es tatsächlich so passiert ist, ich vermute, es war ganz anders." Zwei Freunde, ein Haus, eine niemals endende Party - und Geschichten zwischen Wahrheit und Lüge. "Leere Zeiten" ist eine Bestandsaufnahme eines Lebens wie ein Wachtraum, in dem sich Echtes und Erfundenes untrennbar vermischt.
Soubor vzpomínkových povídek Co odvál čas se ústy očitého svědka vrací do doby II. světové války, do míst a situací, ze kterých se dodnes tají dech a mráz běhá po zádech. Znovu nám připomíná, že pochopení významu té hrůzy , která tehdy zachvátila Evropu, máme stále ještě před sebou ...
Výběr z nejlepších příběhů
V Muzeu hlavního města Prahy byla 3. dubna 1997 otevřena výstava "Po stopách Rychlých šípů". K výstavě připravili její autoři Jiří Stegbauer a Jaroslav Čvančara výběr z nejlepších příběhů "Rychlé šípy a jejich 65 úžasných dobrodružství", který svou obálkou napodobil stejnojmenný obrázkový sešit Mladého hlasatele z roku 1940. Je rovněž menšího formátu, ale zato je tištěn celobarevně na kvalitním papíře. Všechny příběhy nakreslil Jan Fischer a jsou vybrány jak z Mladého hlasatele, tak ze Vpředu. Jejich výběr neodpovídá pořadí sešitu z roku 1940.
Kniha odhaluje smysl slov „skutečná, bezpodmínečná láska“. Autor, dnes už klasik spirituální literatury, se v ní zamýšlí nad podmínkami takového vztahu, kdy si přestáváme jakékoli podmínky klást, protože druhého milujeme takového, jaký je, s tím, co k němu patří, co dělá, jak mluví a co vyznává. Láska totiž nepatří do kategorií, které vládnou tomuto světu a které vyjadřujeme slovy: Co z toho budu mít? „Pravá láska je a vždy musí být darem ve svobodě.“
Komiksové příběhy Rychlých šípů převedené do krátkých povídek.
Klub Rychlých šípů je zpět! První díl stínadelské trilogie s ilustracemi Jiřího Gruse. V temných Stínadlech se cosi dalo do pohybu! Klub Rychlých šípů – Mirek Dušín, Jarka Metelka, Jindra Hojer, Červenáček a Rychlonožka – u toho nesmí chybět! Když chlapci poznají příběh zámečnického učně Jana Tleskače, podniknou nebezpečnou výpravu na nepřátelské území, kde je ukryt plán létajícího kola. Ten má být schovaný v kovovém hlavolamu ježek v kleci. Rychlé šípy to však nebudou mít jednoduché. Stínadlům totiž vládce drsná parta Vontů...
Třetí díl volné trilogie (1. Záhada hlavolamu, 2. Stínadla se bouří) o Rychlých šípech. Mirek Dušín, Jarka Metelka, Jindra Hojer, Červenáček a Rychlonožka se vydávají do starých temných uliček Stínadel, aby pomohli Velkému Vontovi Vláďovi Dratušovi, o němž se šíří zvěsti, že za záhadných okolností přišel o ježka v kleci, nejcennější symbol Vontů. Odhalí při tom další tajemství z dávné vontské historie.
Úplné vydání všech komiksových příběhů slavných Rychlých šípů, které byly napsány a nakresleny. Napínavé a veselé příhody pětice chlapců - Mirka Dušína, Jarky Metelky, Jindry Hojera, Červenáčka a Rychlonožky - přitahovaly před desítkami let mladé čtenáře časopisů Mladý hlasatel a Vpřed. Rychlé šípy dávaly mnoho příkladů a rad v době, kdy bylo třeba (když praskal led, když zrály třešně, když o prázdninách hrozilo uštknutí zmijí, při nálezu nevybuchlé patrony apod.). Mají jistě co říci také dnešním školákům a rádi si nad nimi určitě zavzpomínají i rodiče. Uspořádal Vladimír Dobrovodský. Nakreslili Jan Fischer, Václav Junek, Bohumír Čermák a Marko Čermák.hezký a milý. S oblibou nosil červenou čapku - však také podle ní dostal jméno... Vedle něj je Jindra Hojer, čili ,,moje ublízané potěšení", jak mu Rychlonožka žertem říkával, protože měl vždy pečlivě na pěšinku učesané vlasy. Jemný, veselý chlapec, statečný a věrný, opovrhující násilím a nespravedlností... A konečně Rychlonožka. Samorost, smolař, legračník a vtipálek, zmatkář a strašpytel. Jeho prostořeké průpovídky a vtipy kdekoho rozchechtávaly a on jimi nešetřil ani v nejožehavějších situacích... To tedy jsou Rychlé šípy, chlapci stateční, veselí, odvážní, podnikaví. Však je po otevření knihy brzo poznáte!
Veselá i tajuplná dobrodružství nestárnoucích Rychlých šípů. Příhody legendárního klubu Mirka Dušína, Jarky Metelky, Jindry Hojera, Červenáčka a Rychlonožky, pětice nerozlučných kamarádů, kteří mají smysl pro přátelství, čest a legraci, představil spisovatel Jaroslav Foglar v podobě kresleného seriálu již víc než před osmdesáti lety. Od té doby jejich klukovská dobrodružství ve městě i v přírodě nenechávají v klidu už několik generací nadšených čtenářů. Jubilejní 10. svazek edice Klasické komiksy Marko Čermáka přináší vůbec poprvé souborné vydání všech částí kultovního seriálu, které výtvarník M. Čermák v letech 1968-1971 a 2009 podle scénáře Jaroslava Foglara nakreslil. Kniha je obohacena originálními ukázkami seriálových scénářů J. Foglara včetně jeho nákresů, Foglarovým nikdy nezveřejněným pojednáním z roku 1970 Jak se dělají Rychlé šípy a je doplněna ediční poznámkou k historii seriálu. Limitovaná část nákladu navíc obsahuje pamětní list k tomuto prvnímu soubornému vydání podepsaný Marko Čermákem, osm záložek s výjevy ze seriálu a pohlednici Rychlých šípů od téhož kreslíře.
Kniha hledá řád mikrokosmu. Zmenšování našeho světa nevede k cíli, mikrosvět není zmenšený svět. Teorie předpovídá neuvěřitelné děje, experiment to potvrzuje. Kniha je velmi podrobná a svým čtenářům přináší nejen pohled na to, jak fungují mikro věci, ale mnoho jiného velice zajímavého
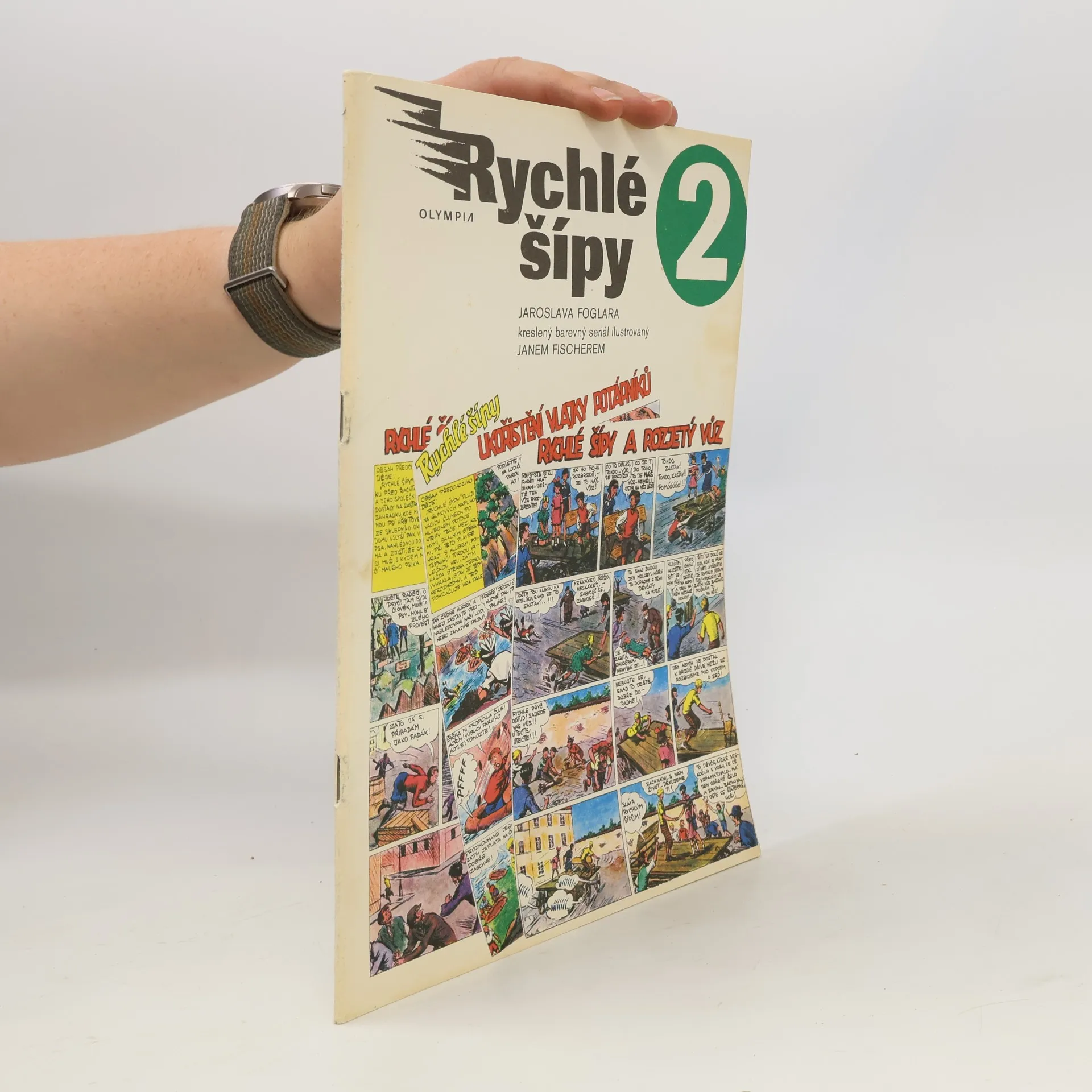
2.vydání. Obrázkový časopis pro chlapce a děvčata (1. ročník) Rychlé šípy – Jaroslav Foglar, Jan Fisher Pískloun a Tlouštík jdou za příhodami Pískloun a Tlouštík udělali objev Pískloun a Tlouštík ve spárech Bratrstva Tlouštík odvlečen v neznámo Tlouštík uniká Bratrstvu kočičí pracky Rychlé šípy dostávají výstrahu Rychlé šípy zvou Tlouštíka Rychlé šípy vystopovány Rychlé šípy jdou na trilobity Rychlé šípy vítězí nad Bratrstvem Rychlé šípy svědky neštěstí Rychlé šípy poctivými nálezci Rychlé šípy šíří klubovní myšlenku Rychlé šípy u záchranné brzdy Rychlé šípy vnikají do chlapeckého domova Rychlé šípy pronásledovány vratným Rychlé šípy v boji s nočními můrami Rychlé šípy zneškodňují noční můry Rychlé šípy a třída Jarky Metelky Rychlé šípy: Bratrstvo kočičí pracky jásá Rychlé šípy: Kočičí pracka chytá léčku Rychlé šípy: Bratrstvo kočičí pracky stihá trest Rychlé šípy: Nadílka opuštěným dětem Rychlé šípy: Příhoda s dědou Sehnoutků
Rychlonožka nastupuje do učení Rychlonožka na podivné stopě Rychlé šípy patrájí po kole Rychlonožka je prozrazen Rychlé šípy sledují Tyčku a spol. Rychlé šípy a létající kolo Rychlé šípy a Podfukář Rychlé šípy chrání Podfukáře Rychlé šípy závodí ve zručnosti Rychlé šípy před známkařskou záhadou Rychlé šípy odhalují podvod Rychlé šípy skládají zprávu na nosech Rychlé šípy sestupují do dolních ulic Rychlé šípy hledají hocha se žlutým kolem Rychlé šípy se vzdávají odměny Strýček Tadeáš Rychlým šípům Rychlé šípy a vykradač chat Rychlé šípy proti ozbrojenému lupiči Rychlé šípy začínají hru o Totem Rychlé šípy objevují Totem Rychlé šípy vítězí ve hře o Totem Rychlé šípy v Údolí záhad Rychlé šípy: Cesta do záhadného domu Rychlé šípy: Jindra s Červenáčkem uvězněn Rychlé šípy jdou za uprchlíky Rychlé šípy na správné stopě Rychlé šípy vracejí uprchlíky Rychlé šípy mají svátek Rychlé šípy staví obojživelný vůz Bratrstvo Kočičí pracky trochu navlhlo Bratrstvo Kočičí pracky plánuje pomstu Rychlé šípy nikdo nedoběhne Rychlé šípy a střelná zbraň Rychlé šípy pomáhají starým lidem Rychlé šípy si vydělávají peníze Rychlé šípy nesou plechovku desetníků Rychlonožkův indiánský sen Rychlonožka u kůlu smrti Rychlé šípy na sjezdu klubů Rychlé šípy hledají Kondory Rychlé šípy v zajetí Kondorů Rychlé šípy a tajemství Kondorů Rychlé šípy žijí Modrým životem Rychlé šípy v podezření Rychlé šípy mají dobrou pověst,ale... Rychlé šípy prokazují svoji nevinu Rychlé šípy těší nemocného chlapce Rychlé šípy sledují oběh koruny
2.vydání. Obrázkový časopis pro chlapce a děvčata (1. ročník) Rychlé šípy – Jaroslav Foglar, Jan Fisher Pískloun a Tlouštík jdou za příhodami Pískloun a Tlouštík udělali objev Pískloun a Tlouštík ve spárech Bratrstva Tlouštík odvlečen v neznámo Tlouštík uniká Bratrstvu kočičí pracky Rychlé šípy dostávají výstrahu Rychlé šípy zvou Tlouštíka Rychlé šípy vystopovány Rychlé šípy jdou na trilobity Rychlé šípy vítězí nad Bratrstvem Rychlé šípy svědky neštěstí Rychlé šípy poctivými nálezci Rychlé šípy šíří klubovní myšlenku Rychlé šípy u záchranné brzdy Rychlé šípy vnikají do chlapeckého domova Rychlé šípy pronásledovány vratným Rychlé šípy v boji s nočními můrami Rychlé šípy zneškodňují noční můry Rychlé šípy a třída Jarky Metelky Rychlé šípy: Bratrstvo kočičí pracky jásá Rychlé šípy: Kočičí pracka chytá léčku Rychlé šípy: Bratrstvo kočičí pracky stihá trest Rychlé šípy: Nadílka opuštěným dětem Rychlé šípy: Příhoda s dědou Sehnoutků
Od 3.10.2024 začala postupně vycházet sešitová vydání Rychlých šípů Foglar-Fischer podle sedmi čísel vydaných PULS Ostrava v letech 1967-69. Nepůjdou koupit v knihkupectvích, ale pouze v prodejnách tisku (viz níže). Součástí sešitů je navíc vždy sada sběratelských kartiček Rychlých šípů.
Obrázkový časopis pro chlapce a děvčata (1. ročník) Rychlé Šípy – Jaroslav Foglar, Jan Fisher Rychlé šípy se sázejí Rychlé šípy robí Šlapohyb Rychlé šípy závodí Mirek Dušín je odškodněn Rychlé šípy a Samoletka Rychlonožka v říši snů Rychlé šípy na Černém potoceRychlé šípy ve zbořeném mlýně Rychlé šípy na stopě tuláka Rychlé šípy zachraňují člověka Rychlé šípy modelaří Rychlé šípy a trosečníci Rychlé šípy na výpravě Rychlé šípy zachraňují kamaráda Rychlé šípy na sáňkařské závody Rychlé šípy dovedou prohrávat Rychlé šípy maminkám Rychlé šípy cvičí sebeovládání Rychlé šípy na pramici Rychlé šípy trestají piráty Rychlé šípy nalézají Pátka Rychlé šípy na prázdniny Rychlé šípy ztroskotají Rychlé šípy se předstihují
3. vydání. Obrázkový časopis pro chlapce a děvčata Rychlé Šípy - Jaroslav Foglar, Jan Fisher Mirek osvobozuje Jarku Přistupuje Jindra Hojer Černí Jezdci Neumějí prohrávat Klub Rychlých šípů založen Rychlé šípy loví bobříky Rychlé šípy hrají divadlo Rychlé šípy škádlíRychlonožku Rychlé šípy varují před tenkým ledem Rychlé šípy odklízejí sníh Rychlé šípy na zimním stadionu Rychlé šípy dobývají pevnost Rychlé šípy sáňkují Rychlé šípy proti Dlouhému bidlu Dlouhé bidlo kuje pomstu Dlouhé bidlo hledá kočičí pracku Rychlé šípy pod vlivem kočičí pracky Rychlé šípy u kočičího hrobu Rychlé šípy vracejí talisman Rychlé šípy přijímají nováčka Rychlé šípy v nebezpečí Rychlé šípy v pískových skalách Rychlonožka vítězí nad přesilou Rychlé šípy v cizím táboře Rychlé šípy v obležení
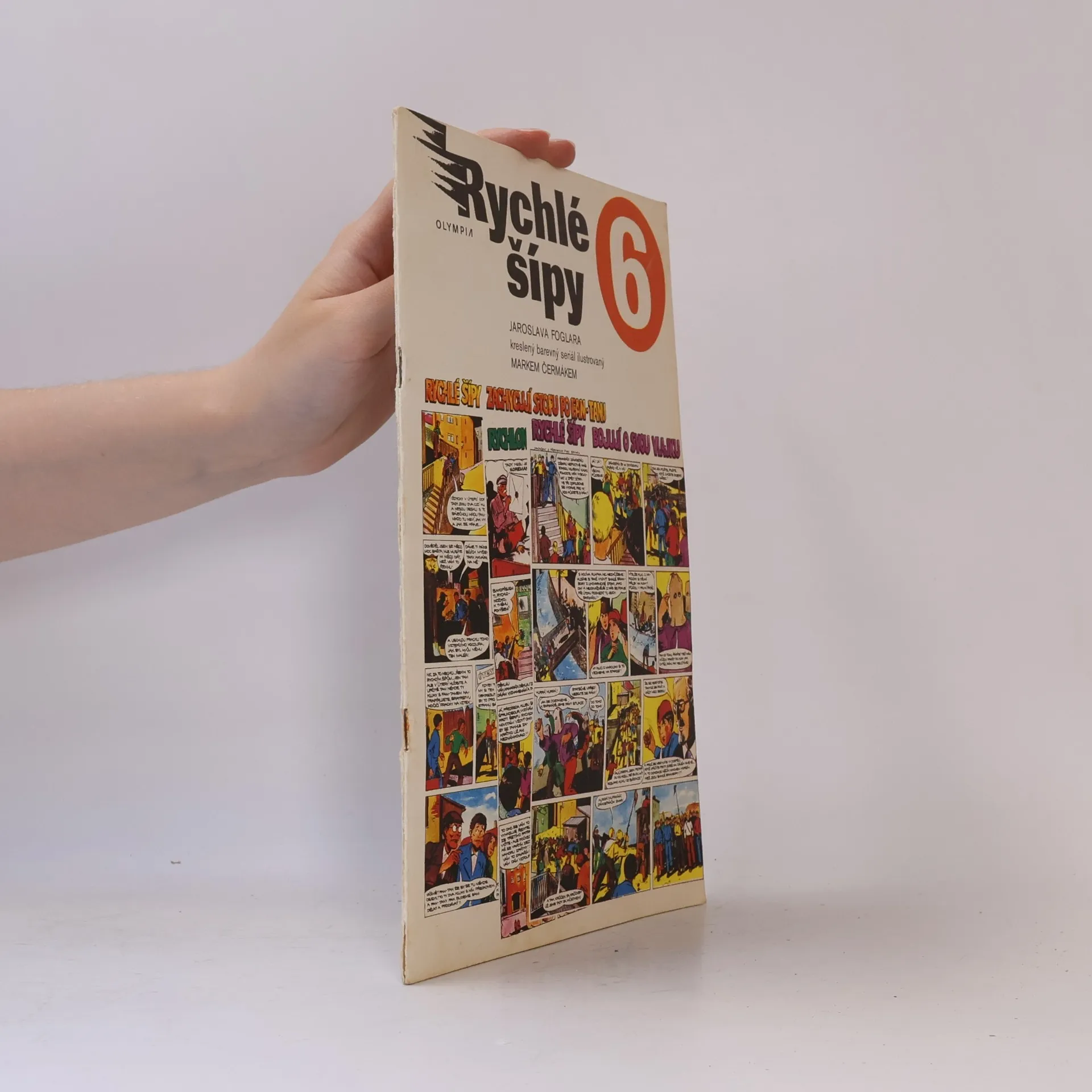
Rychlé šípy zachraňují Dlouhé Bidlo Rychlé šípy střeží výstavku Rychlé šípy hledají neznámého vetřelce Rychlé šípy ztrácejí svou klubovnu Rychlé šípy před těžkým rozhodnutím Rychlé šípy tajně varováni Rychlé šípy zaskočeni Jardou Murkačem Rychlé šípy se rozcházejí s Murkačovci Rychlé šípy opět pod vlastní střechou Rychlé šípy na nebezpečné sanici Rychlé šípy plní záhadnou výzvu Rychlé šípy dostávají vánoční nadílku Rychlé šípy nosí v zimě čepice Rychlé šípy mají v klubu jasnovidce Rychlé šípy zastavují tramvaj Rychlé šípy proti tlupě tuláků Rychlé šípy v ledovém stavení Rychlé šípy zápolí s jedovatým dědkem Rychlé šípy se odvažují znovu do sklepa Rychlé šípy zachycují stopu po Fan-Tanu Rychlé šípy končí honbu za Fan-Tanem Rychlé šípy bojují proti kouření Rychlé šípy unikají potupě Rychlé šípy dávají nocleh Potápníkům Rychlé šípy jdou za most pro své věci Rychlé šípy bojují o svou vlajku Rychlé šípy vypisují Jarkovu soutěž Rychlonožka ve snu ředitelem školy Jindrovo neuvážené počínání Rychlé šípy se skrývají hlídačům Rychlé šípy se ospravedlňují Rychlé šípy v roli detektivů Rychlé šípy běží za zloději kufrů Rychlé šípy se vydávají na skalní říčku Rychlé šípy ve vodní pasti Rychlé šípy hledají únik z jeskyně Rychlé šípy se zachraňují Rychlé šípy ztrácejí člena Rychlé šípy mají vyjimečně štěstí Rychlé šípy válčí na kolejích Rychlé šípy vynalézají novou zábavu Rychlé šípy jezdí na pětikole Rychlé šípy jedou na přehradu
Rýchle šípy sú určené malým čitateľom a ich rodičom. V každom zväzku nájdete pôvodný komiksový seriál a nové komiksy zo sveta Jaroslava Foglara od súčasných autorov. Komiksy sú doplnené tematickým poviedkami, hrami, súťažami a kvízmi. Vhodné pre každého od 6 do 99 rokov.
První díl komiksů o Rychlých šípech, jejichž příběhy už vyšly časopisecky, ale do roku 1969 nikdy souhrnně.96 příběhůNa konci slovo autora – srpen 1969.
Druhý díl volné trilogie (1. Záhada hlavolamu, 3. Tajemství Velkého Vonta) napínavých příběhů legendární party Rychlé šípy. Ztracený ježek v kleci je opět nalezen a s ním se rozvíjí série nových dobrodružství. Vontské hnutí ožije a znovu se schyluje k volbě Velkého Vonta. Rychlým šípům se podaří nalézt první Vontskou kroniku a poznají tajemnou historii zrodu Vontů. Seznámí se s ušlechtilým slepým chlapcem Vláďou Dratušem a právě jemu pomohou stát se Velkým Vontem. Ilustroval Jan Fischer. 4.vydání
Rychlé šípy v podzemí Rychlé šípy konají dobro Rychlé šípy bez klubovny Rychlé šípy na pokraji záhad Síť záhad se zatahuje Tajemství dvoukoláku Rychlé šípy pátrají ve sklepě Rychlé šípy na omylu Rychlé šípy napravují kamaráda Rychlé šípy v objetí kouzel Rychlé šípy pozorují Jeremiášku Rychlé šípy se prozrazují Rychlé šípy a strašidlo Rychlé šípy ničí knihu kouzel Rychlé šípy hlídají trať Rychlé šípy v redakci Rychlé šípy v ohni pátrání Rychlé šípy a první led Rychlé šípy: Nadílka opuštěným dětem Rychlé šípy: Příhoda s dědou Sehnoutků Pískloun a Tlouštík jdou za příhodami Pískloun a Tlouštík udělali objev Pískloun a Tlouštík ve spárech Bratrstva Tlouštík odvlečen v neznámo Tlouštík uniká Bratrstvu K.P. Rychlé šípy dostávají výstrahu Rychlé šípy zvou Tlouštíka Rychlé šípy vystopovány Rychlé šípy jdou na trilobity Rychlé šípy vítězí nad Bratrstvem Rychlé šípy na pouti Rychlé šípy na Svatodušní výpravě Rychlé šípy: Podivná návštěva ze tmy Rychlé šípy: Na pomoc zajatci Rychlé šípy na nepřátelském ostrově Rychlé šípy bojují na rybníce Rychlé šípy svědky neštěstí Rychlé šípy poctivými nálezci Rychlé šípy šíří klubovní myšlenku Rychlé šípy u záchranné brzdy Rychlé šípy vnikají do chlapeckého domova Rychlé šípy pronásledováni vrátným Rychlé šípy v boji s nočními můrami Rychlé šípy zneškodňují noční můry Rychlé šípy a třída Jarky Metelky Rychlé šípy: Kočičí pracka chystá léčku Rychlé šípy: Bratrstvo Kočičí pracky jásá Rychlé šípy: Bratrstvo Kočičí pracky stíhá trest
Mirek osvobozuje Jarku Klub Rychlých šípů založen Rychlé šípy loví Bobříky Rychlé šípy hrají divadlo Rychlé šípy škádlí Rychlonožku Rychlé šípy varují před tenkým ledem Rychlé šípy odklízejí sníh Rychlé šípy na zimním stadiónu Rychlé šípy dobývají pevnost Rychlé šípy saňkují Rychlé šípy proti Dlouhému Bidlu Dlouhé Bidlo kuje pomstu Dlouhé Bidlo hledá kočičí pracku Rychlé šípy pod vlivem kočičí pracky Rychlé šípy u kočičího hrobu Rychlé šípy vracejí talisman Rychlé šípy na Černém potoce Rychlé šípy ve zbořeném mlýně Rychlé šípy na stopě tuláka Rychlé šípy zachraňují člověka Rychlé šípy na sáňkařské závody Rychlé šípy dovedou prohrávat Rychlé šípy přijímají nováčka Rychlé šípy v nebezpečí Rychlé šípy v Pískových skalách Rychlonožka vítězí nad přesilou Rychlé šípy v cizím táboře Rychlé šípy v obležení Rychlé šípy se sázejí Rychlé šípy robí šlapohyb Rychlé šípy závodí Mirek Dušín je odškodněn Rychlé šípy a samoletka Rychlonožka v říši snů Rychlé šípy modelaří Rychlé šípy a trosečníci Rychlé šípy na výpravě Rychlé šípy zachraňují kamaráda Rychlé šípy maminkám Rychlé šípy cvičí sebeovládání Rychlé šípy na pramici Rychlé šípy trestají piráty Rychlé šípy nalézají Pátka Rychlé šípy na prázdninách Rychlé šípy ztroskotají Rychlé šípy se předstihují...